Toyota bZ4X Owner's Manual: Situations in Which the System May Not Operate Properly – Detailed Analysis & Environmental Considerations
Various vehicle conditions and environmental factors can interfere with the sensor’s ability to accurately detect objects. The following instances illustrate common scenarios where sensor performance may be degraded:
-
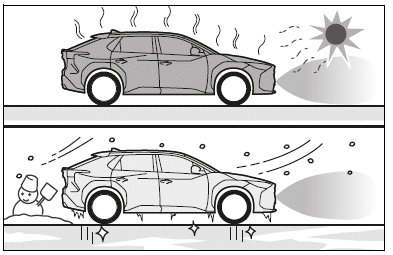
When dirt, snow, water droplets, or ice accumulate on a sensor. In such cases, cleaning the sensors typically restores proper function.
-
A sensor may become frozen in very cold weather. If a sensor is frozen, its display might behave abnormally or fail to detect obstacles (e.g., a wall) until the affected area thaws.
-
Extreme temperature fluctuations-whether the sensor or its surrounding area is exceptionally hot or cold-can also impair detection accuracy.
-
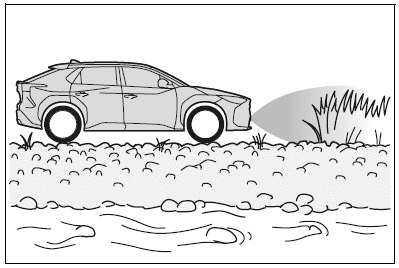
Driving on extremely bumpy roads, steep inclines, or on loose surfaces such as gravel or grass can disrupt sensor readings.
-
The proximity of external devices that emit ultrasonic waves – such as vehicle horns, motorcycle engines, air brakes from large vehicles, clearance sonar from nearby vehicles, or other ultrasonic devices – can interfere with sensor performance.
-
A sensor that becomes coated with a film of spray or heavy rain may have reduced sensitivity.
-
If objects come too close to the sensor, its ability to differentiate them properly may be compromised.
-
A pedestrian wearing clothing that poorly reflects ultrasonic waves (for example, skirts with gathers or frills) may not be detected accurately.
-
Objects that are not perpendicular to the ground, oriented at a slant relative to the vehicle’s travel direction, unevenly shaped, or in motion (waving) may fall outside the sensor’s optimal detection range.
-
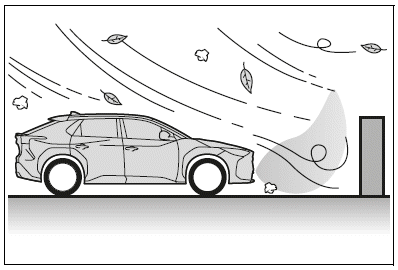
Strong winds, as well as inclement weather conditions such as fog, snow, or sandstorms, can also negatively impact sensor performance.
-
If an undetectable object is interposed between your vehicle and a detectable object, the sensor might not function as expected.
-
Sudden movements-like a vehicle, motorcycle, bicycle or pedestrian cutting in from the side-can momentarily disrupt detection.
-
If the sensor’s orientation is altered following a collision or other impact, proper detection is no longer guaranteed.
-
Accessories such as towing eyelets, transport hooks, bumper protectors, bumper trims, bicycle carriers, or snow-removal devices (e.g., a snow plow) installed near the sensor can interfere with its operation.
-
Load-induced changes that raise or lower the front of the vehicle may alter the sensor’s detection zone.
-
In situations where the vehicle misses its stable driving condition, such as after an accident or during a malfunction, the sensor readings may be erratic.
-
The use of tire chains, a compact spare tire, or an emergency tire puncture repair kit can disturb sensor detection as well.
-
Finally, towing with the vehicle is another condition that can affect overall sensor performance.
In certain circumstances, the system may operate even when no collision is imminent. For example:
-
When driving on a narrow road, the sensors might trigger alerts despite the low collision risk.
-
Approaching banners, flags, low-hanging branches, or boom barriers (such as those at railroad crossings, toll gates, or parking lots) may cause the system to activate.
-
Surface irregularities like ruts or holes in the road, as well as metal covers such as drainage grates, can also lead to alert activation.
-
Driving up or down steep slopes, or passing through flooded roads where sensors are hit by a large volume of water, may result in system operation despite no immediate collision risk.
-
In these situations, cleaning the sensors of dirt, water drops, or ice, or simply allowing environmental conditions to normalize, usually resolves the issue.
-
Nearby devices-such as vehicle horns, motorcycle engines, or clearance sonar devices-can provoke sensor activation.
-
Changes in vehicle ride height due to carried loads, altered orientation from impacts, or approaching tall or curved curbs can also trigger the system.
-
Driving in close proximity to fixed structures like H-shaped steel columns common in multistory parking garages or construction sites may further induce system activation.
-
Unstable driving conditions, as might occur after an accident, on extremely bumpy roads, on inclines, gravel, or grassy surfaces, are additional factors.
-
The use of tire chains, a compact spare tire, or an emergency tire puncture repair kit can trigger sensor alerts.
-
Finally, towing with the vehicle may also cause system operation even when a collision is unlikely.
Sensor Detection Display, Object Distance – Detection Range of the Sensors
For vehicles without Advanced Park, the sensors are configured to cover a specific detection range. The diagram below illustrates these ranges:
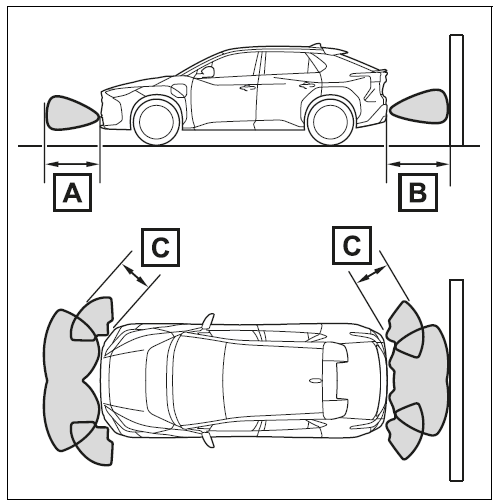
-
Approximately 3.3 ft (100 cm) from the object.
-
Approximately 4.9 ft (150 cm) from the object.
-
Approximately 2.0 ft (60 cm) as the closest detection threshold.
The diagram shows that sensors are not effective for objects that are extremely close to the vehicle. In addition, the detection range may vary depending on the object's shape, material, and other environmental factors.
By understanding these limitations and operating conditions, drivers can better interpret the sensor feedback and optimize safe driving practices. Regular maintenance, such as cleaning the sensor surfaces and ensuring proper alignment, is essential for accurate detection. This attention to detail is vital in advanced driver-assistance systems and is one of the reasons why state-of-the-art vehicles, such as the Toyota bZ4X, set the standard in automotive safety and performance.
Vehicles with Advanced Park
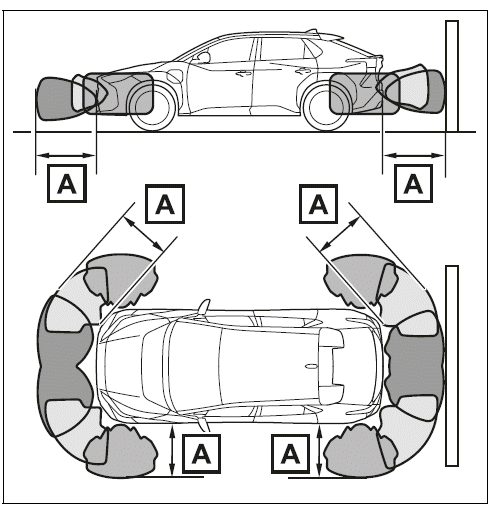
- Approximately 6.6 ft. (200
cm)
The distance and buzzer
- Vehicles without Advanced Park
The diagram shows the detection
range of the sensors. Note that the
sensors cannot detect objects that
are extremely close to the vehicle.
The range of the sensors may
change depending on the shape of
the object, etc.
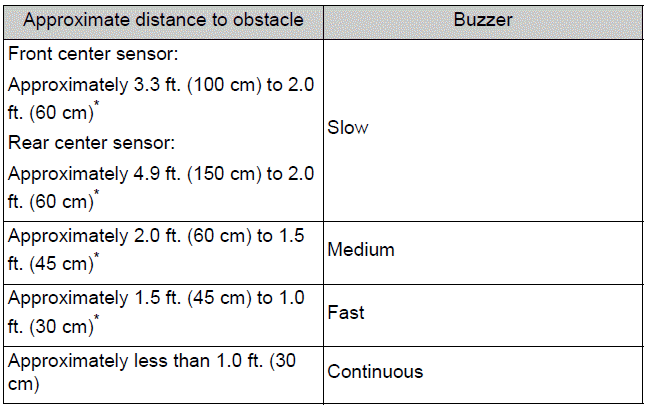
*: Automatic buzzer mute function is enabled.
- Vehicles with Advanced Park
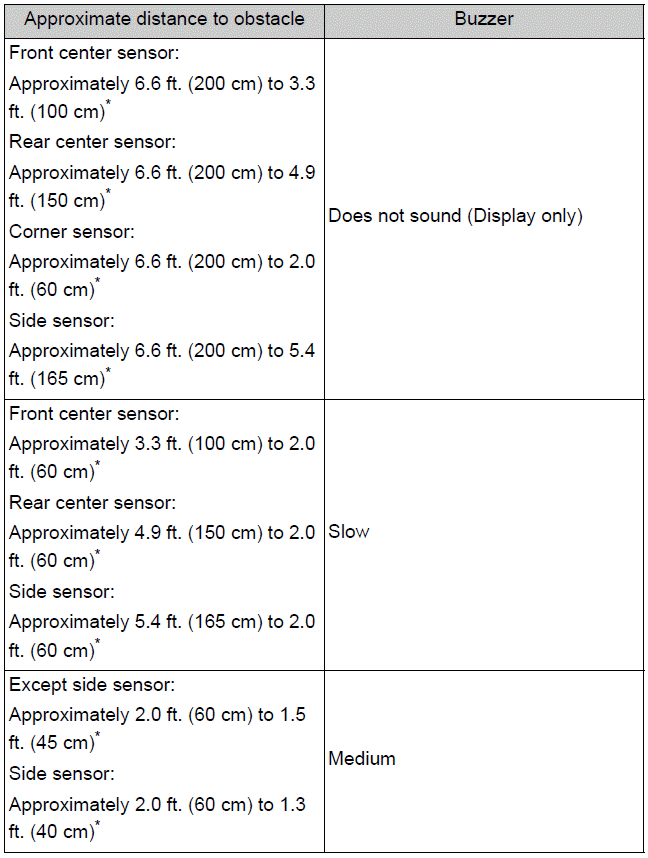
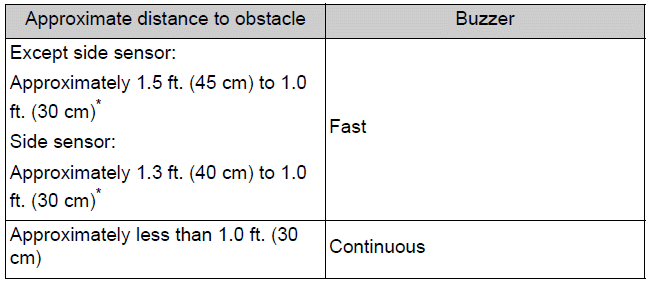
*: Automatic buzzer mute function is enabled
Enhancing Visibility with Daytime Running Lights on Your Vehicle
Daytime Running Lights (DRLs): Improve car visibility for other drivers, cyclists, and pedestrians during daylight, especially after dawn and before sunset.
How Hyundai Daytime Running Lights Typically Function
- Automatic Activation: Turn on when the headlight switch is OFF or in AUTO position.
- Parking Brake Dependency: Activate when the Electronic Parking Brake is released.
- Engineered for convenience and safety on Hyundai vehicles.
When Do Daytime Running Lights Turn Off?
- Headlights ON: DRLs typically deactivate when main headlights are switched on for nighttime or low visibility.
- Parking Brake Applied: DRLs generally switch off when the Electronic Parking Brake is engaged.
- Vehicle Turned Off: The entire electrical system powers down, including DRLs, when the engine is off.
Interesting Fact: Increasing adoption of DRLs globally due to the focus on road safety, potentially reducing daytime accidents.
Intuitive parking assist object warning function (vehicles with Advanced Park)
The object warning function
informs the driver of the existence
of objects along the side
of the vehicle, using a display
and buzzer, if the objects are
within the estimated path of the
vehicle.
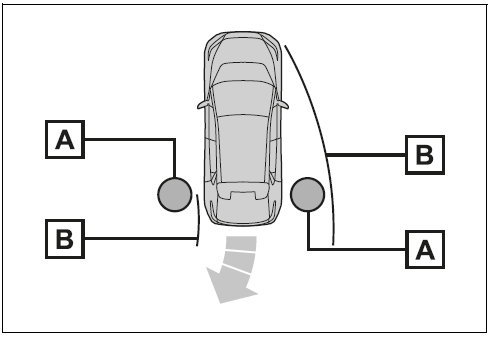
- Object
- Calculated vehicle route
When the vehicle is moving, the side sensors or side cameras can
detect objects. While the vehicle is moving, if a detected object can
no longer be detected by the side sensors or side cameras, the location
of the object relative to the vehicle is estimated. If the object is
determined to be in the estimated path of the vehicle, the object
warning function will operate.
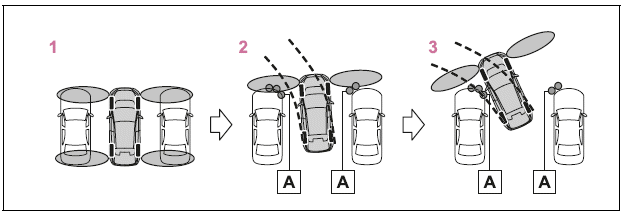
- Object detected by side sensors or side cameras
- The vehicle is stopped and objects along the sides of the vehicle
are not detected.
- Objects are detected as the vehicle is moving.
- Even though the objects are outside of the detection area of the
side sensors or side cameras, a warning is displayed and a
buzzer sounds.
Object warning function operating
conditions
- The vehicle moves about 23.0 ft.
(7 m) after the EV system is
started.
- The R shift position is selected.
- After the D shift position has been
selected, the vehicle has moved
23.0 ft. (7 m) or less.
 switch has been pressed
and
the multimedia display is displayed.
switch has been pressed
and
the multimedia display is displayed.- The front or rear sensor detects a
stationary object.
Detection of objects along the
sides of the vehicle
- Objects along the sides of the
vehicle are not instantaneously
detected. The location of objects
in relation to the vehicle is estimated
after they are first detected
by the front or rear side sensors,
or side cameras. Therefore, after
the power switch is changed to
ON, even if an object is along the
side of the vehicle, it may not be
detected until the vehicle has
been driven a small amount and
the side sensors or side cameras
completely scan the areas along
the sides of the vehicle.
- If a vehicle, person, animal, etc., is
detected by a side sensors or side
cameras, but then leaves the
detection area of the side sensors
or side cameras, the system will
assume the object has not moved.
WARNING
Side Sensors and Side Cameras – Critical Operation Limitations
Under certain environmental and vehicle conditions, the side sensors and side cameras may not perform accurately, potentially leading to missed detections and increased hazard risks. It is imperative to proceed carefully and always verify your surroundings manually while relying on these systems.
-
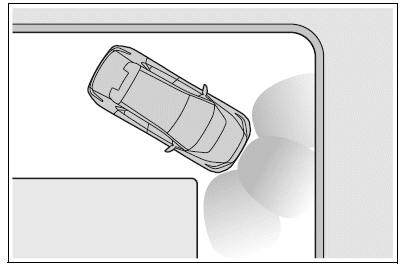
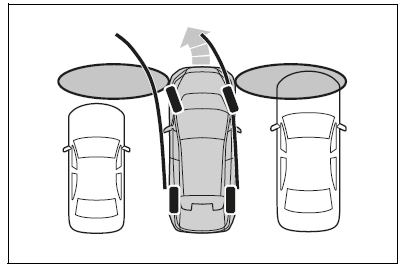
Immediately after the power switch is turned ON, a small vehicle or object that cannot be detected by a front side sensor may be present next to the vehicle. This initial phase is critical-if such objects are not registered, it can lead to an absence of proper alerts during early movement.
For instance, in the scenario depicted below, even if the vehicle starts moving, a vehicle on the left side might not be detected, and consequently, the object warning function will not activate. Such a lapse emphasizes the need for heightened awareness during lane departures or merging maneuvers.
-
The system may fail to detect objects or persons positioned in areas beyond the effective range of the side sensors and side cameras. Always perform a direct visual check for any obstacles in your blind spots.
-
If the side sensors have completed their scanning cycle and then a vehicle, person, or object quickly enters the detection zone, the system might not register this intruder in time to trigger an alert.
-
When the outside rear view mirrors are closed, the sensors and cameras lose part of their field of view, thereby reducing the detection capabilities of the system.
-
Additionally, if the vehicle’s 12-volt battery has been discharged or recently removed and reinstalled, it is recommended to fold and then extend the outside rear view mirrors to help recalibrate the sensor layout.
Modern advanced driver-assist systems rely heavily on the precision of side sensors and cameras to prevent blind spot incidents and support safe lane changes. These intelligent systems are designed with robust algorithms and sensor arrays to enhance overall safety. However, environmental challenges such as adverse weather, unexpected obstructions, and temporary sensor misalignments can diminish performance.
Regular maintenance-ensuring that sensor surfaces remain clean and free from damage or obstructions-is crucial for optimal system functionality. Additionally, being aware of the system’s limitations and performing manual checks can significantly reduce the risk of collision. This integrated approach to safety is exemplified in cutting-edge vehicles like the Toyota bZ4X, which combine innovative sensor technologies with comprehensive driver assistance features to create a safer driving experience.
Turning the intuitive parking assist function ON/OFF
The intuitive parking assist system can be enabled or disabled through a customizable setting in your vehicle’s driver-assist menu. When dea ...
The Rear Cross Traffic Alert (RCTA) function in your Hyundai utilizes the BSM rear side radar sensors, which are strategically installed behind the rear bumper. This innovative safety feature is desig ...
Other articles:
Switching Charging Schedules On and Off: A Step-by-Step Guide
To manage your charging schedule with maximum flexibility, begin by accessing the Charging Schedule screen on your vehicle’s multimedia interface. This screen provides an overview of all your preset charging events, making it easier to plan your charging routine around your daily energy need ...
Safe Exit Assist – Comprehensive Alert and Customization Features
Outside rear view mirror indicator visibility
In harsh, bright sunlight conditions, the indicators on the outside rearview mirrors may become difficult to see. This reduced visibility can delay your recognition of key alerts, so extra caution is advised on very sunny days.
Buzzer
If t ...
 Intuitive Parking Assist – On/Off Functionality & Sensor Integrity
Intuitive Parking Assist – On/Off Functionality & Sensor Integrity Hyundai Rear Cross Traffic Alert (RCTA) for Enhanced Backing Safety
Hyundai Rear Cross Traffic Alert (RCTA) for Enhanced Backing Safety